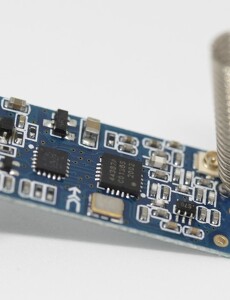
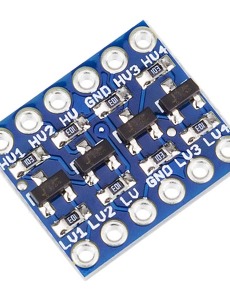
전체 글108 [휴대폰/패드 충전] 아이폰, 늦게 충전되는 문제를 둘러싼 충전기/케이블 이해 수많은 전자 기기를 USB로 충전하고, 그에 따른 여러가지 기술이 범람하면서, 왜 충전이 어떤 경우는 잘 되다가 느리게도 되는지, 안되는지 등등에 대한 의구심이 가득해질때가 있다. 특히나 애플 기기의 경우 정품 충전기/케이블이 고가이다보니 여러 충전기나 케이블을 별도 구매해서 쓰다가 다양한 상황을 만나게 된다. 오늘은 그래서 우리가 잘 모를 경우 매일 조금씩 손해를 볼 수 있는 이 아이폰 충전 문제에 대해 알아보자. 애플 아이폰, 아이패드를 중심에서 적었지만 다른 usb활용 충전도 도움이 될것이다. 우선 학생 때 배웠던 전력 = 전압 * 전류 공식을 우선 기억하자. 대개의 USB충전은 5V기준이므로, 이 기기가 1A의 전류를 보낼 수 있다면 5W = 5V * 1A 의 충전기가 되고, 충전기 외관 어딘가에.. 2023. 6. 3. [라즈베리파이3,4/레트로게임기] 남는 라즈베리파이로 만드는 고전 게임기(retropie, recalbox) 라즈베리파이는 다양한 응용이 가능한데, 그 중 아재들의 마음을 흔드는 것은 레트로 게임기이다. 유명한 오픈소스 프로젝트인 레트로파이(retropie)와 리콜박스(recalbox)가 대표적이다. 여기에 시중에서 USB 조이스틱을 붙이면 예전 MSX나 패미컴 게임기, 심지어는 MS-DOS 에뮬 게임기로 바꿀 수 있다. 이 두개의 오픈 프로젝트는 고전게임 에뮬을 탑재할 수 있도록 만들어진 OS이미지를 제공해주는데, 사실은 각 게임의 롬을 복사하는 과정도 어렵다. 그래서 단순 테스트 및 시험용 목적에는 완성된 OS이미지를 구할 수 있다. 여기서는 그 간단한 방법을 알아보자. (여기서는 개인용 시험 정도로 한정하고, 각 롬 이미지의 합법성 여부는 콘텐츠별 개인 판단이 필요하다) 전체적인 과정은 Win32DiskI.. 2020. 10. 30. [딥레이서] 아마존 AWS 딥레이서(deepracer) 오늘은 조금 색다른 주제이다. 아마존에서는 머신러닝과 클라우드 활성화를 위해, 카메라 영상 기반의 자율주행을 간단히 실험해볼 수 있는 딥레이서를 2018년말에 출시했다. 이어 약 2년 동안 다양한 행사를 진행해 오고 있다. 개인적으로는 이런 잉여 프로젝트(?)를 진행할 수 있다는 점에서 아마존의 시도가 부러운 행사였다. 미국동부 region에서만 가능한 이 딥레이서는 지난 2년간 UI가 상당히 발전한 것도 특이사항이다. 초기의 여러가지 복잡할만한 UI가 조금만 익히면 빠르게 적응할 수 있도록 바뀌었다. 그래서 초기에 이 딥레이서를 했던 사람이라면 많이 변한 UI에 또한번 놀랄만하다. aws.amazon.com/ko/deepracer/ AWS DeepRacer – 기계 학습을 시작하는 가장 빠른 방법 AW.. 2020. 10. 3. [통신모듈/HC-12] 저렴하고 긴 거리 통신이 가능한 HC-12 중거리 통신이 가능한 HC-12 통신 모듈에 대해 알아보자 ▶ 이 가이드를 따라하면 - 블루투스나 433Mhz보다 더 긴 거리를 커버하면서, 사용법도 간단한 HC-12를 활용할 수 있다. ▶ 기존 읽어보면 좋을 강의 - 동일한 시리얼 통신 방식으로 작동하는 APC-220 : https://bbangpan.tistory.com/27 ▶ 부품 설명 및 회로 구성 그동안 몇가지 통신 모듈을 소개했었는데, 이보다 더 마음에 드는 모듈이 없었다. 저렴한 가격에 먼거리 통신이 가능했기 때문이다. 대부분 블루투스나 433Mhz통신 모듈이 방이나 옆방정도까지가 가능하다면, HC-12는 집 전체와 집 밖도 어느정도 커버할 수 있다. 통신 속도를 낮추면 야외에서는 최대 1.8km거리까지 도달한다고 알려져있다. 단순한 2개.. 2020. 8. 22. [센서/마이크증폭센서] 민감도가 자동 조절되는MAX9814 AGC센서 민감도가 자동으로 변하는 MAX9814 microphone amplifier with automatic gain control 을 이해할 수 있다. ▶ 이 가이드를 따라하면 - AGC(Automatic Gain Control) 기능이 달린 마이크 증폭 센서를 다룰 수 있다. ▶ 기존 읽어보면 좋을 강의 - 마이크 증폭 센서 MAX4466 : https://bbangpan.tistory.com/23 ▶ 부품 설명 및 회로 구성 이미 소리의 정도를 예측하는 센서는 MAX4466을 먼저 다뤄본 적이 있어서 간단한 소리 검출은 해당 센서로 하면 충분하다. 그러면 이 MAX9814 센서는 어떻게 다를까? 먼저 AGC(Automatic Gain Control/자동 게인 제어)를 이해해보자. 생각외로 소리는 입력의 .. 2020. 7. 25. [센서/UV디지털센서] VEML6075 자외선 센서, UVA/UVB/UV index 측정 자외선을 디지털로 측정할 수 있는 VEML6075 센서를 활용할 수 있다. ▶ 이 가이드를 따라하면 - UVA, UVB, UV index값 모두를 얻을 수 있는 VEML6075센서 사용법을 알 수 있다.. ▶ 기존 읽어보면 좋을 강의 - UV 아날로그 센서 : https://bbangpan.tistory.com/77 ▶ 부품 설명 및 회로 구성 기존에서 UV센서를 소개한 적이 있는데, 이번에는 I2C 방식으로 디지털 값을 얻어올 수 있는 VEML6075센서이다. 매우 작은 센서이고 3.3V를 기반으로 하며 SparkFun이나 Adafruit 모두 이 센서를 판매하고 있다. 다만 여기서는 aliexpress에서 구매한 유사 센서이다. 각 회사마다 지원하는 Voltage가 다른데, 이 센서는 기본적으로 3... 2020. 7. 21. [센서/소리감지센서] FC-04, 소리 검출 센서, 사운드 센서로 소리 발생 유무를 탐지 일정 크기 이상의 소리를 감지하면 반응하는 소리 검출 센서를 통해 소리 발생 유무를 탐지할 수 있다. ▶ 이 가이드를 따라하면 - 특정 소음 수준을 미리 지정하고, 그 이상 소음이 발생하면 DOUT으로 HIGH를 출력하는 FC-04 센서를 다룰 수 있다.. ▶ 기존 읽어보면 좋을 강의 - 음량 측정 센서 MAX4466 : https://bbangpan.tistory.com/23 ▶ 부품 설명 및 회로 구성 FC-04는 특정 크기의 소리가 발생했는지를 감지할 수 있는 저가의 센서이다(Aliexpress에서 개당 천 원이 넘지 않는다). 다만 작동은 단순하고 꽤 정확하다. 곧바로 모듈 사진을 보면 소형 마이크로폰(오른쪽)과 음량 기준을 조절할 수 있는 나사 조절부, 전원 표시 LED 및 임계치 소리를 넘었는.. 2020. 7. 16. [센서/레이저 장애물 센서] Waveshare laser sensor , 레이저 장애물 센서 지향성 강한 레이저로 단거리내 장애물 존재 여부를 감지하는 Waveshare laser sensor를 이해한다 ▶ 이 가이드를 따라하면 - 60cm정도 가까운 범위내의 직선상에 장애물 존재 여부를 정확히 검출하는 레이저 센서를 사용할 수 있다. ▶ 기존 읽어보면 좋을 강의 - HC-04 초음파 센서 : https://bbangpan.tistory.com/49 ▶ 부품 설명 및 회로 구성 장애물 감지 센서처럼 다양하게 판매되는 아두이노용 센서도 없는데, 그 중에서도 이 센서는 특별하다. 가장 흔히 사용되는 초음파 센서도 어느 정도의 지향성은 있지만 뒤로 갈수록 대상 범위가 부채꼴로 퍼져나간다거나, 5cm 이하 거리는 잘 검출이 되지 않는 등 종잡을 수가 없다지만, 이 레이저 센서는 그런 면에서는 신뢰도가 .. 2020. 7. 15. [기타/로직레벨컨버터] 3.3V to 5V logic level converter를 이해하자 3.3V to 5V logic 을 전환하는 Logic Level Converter를 사용하여 3.3V, 5V 기기간 원활한 연결을 할 수 있다. ▶ 이 가이드를 따라하면 - 필요시 적절하게 3.3V to 5V 레벨 전환을 할 수 있다. ▶ 부품 설명 및 회로 구성 아두이노를 하면서 당혹스러운 경우 중의 하나가 3.3V 기기와 5V 기기이다. 처음에는 특별한 고민없이 구매했다가 Arduino UNO사용자의 경우는 3.3V 기기를 사서 곤혹스러운 경우가 있고, 그 반대의 경우도 생긴다(Arduino Due 나 Arduino Pro Mini 같은 특정 Arduino 보드는 3.3V 기반으로 작동한다.) 이럴때 사용하는 것이 바로 레벨 컨버터(3.3V to 5V)이다. 우선은 Bi-directional과 Uni.. 2020. 7. 14. 이전 1 2 3 4 ··· 12 다음